Visión Artificial
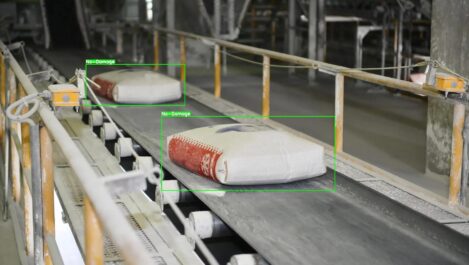
Desarrollamos soluciones basadas en visión artificial y deep learning para cualquier sector. Te acompañamos en todo el proceso diseñando una solución a medida.

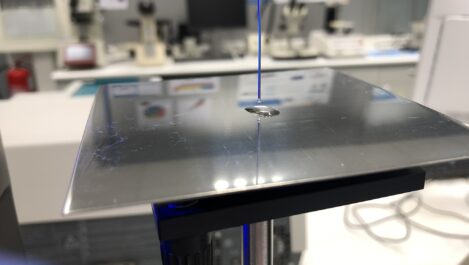
Actualmente la colocación y almacenamiento de las piezas a la salida de inyectora es manual debido a alta variabilidad de las referencias.
Automatización del proceso con visión y robot colaborativo.
Recogida y colocación de piezas en cajas de forma ordenada, y colocación de la láminas protectoras de separación.
Diseño completo de la integración del sistema de visión (cámara, óptica e iluminación para piezas altamente reflectantes), entrenamiento del sistema y comunicaciones con UR.


Tu éxito es nuestra meta. Queremos ser tu compañero en el desarrollo de tus proyectos, aprovechando el poder de la innovación, la flexibilidad y la confianza que ofrecemos. Juntos, marcamos la diferencia a través de nuevas tecnologías.
¡Contáctanos y construyamos el futuro juntos!
Somos un equipo de expertos apasionados por la innovación industrial, comprometidos con la excelencia y el éxito de nuestros clientes.


Suscríbete a nuestra newsletter y te enviaremos todos los contenidos que te interesan, directamente a tu correo electrónico.