Las cámaras de visión 3D reconstruyen los objetos de una imagen en tres dimensiones, igual que hace nuestro cerebro. Cada vez más se utilizan en aplicaciones industriales ya que proporcionan múltiples funcionalidades. En este blog os explicamos los distintos tipos de cámaras 3D que existen según su modo de funcionamiento y las distintas aplicaciones industriales que podemos realizar con ellas.
La visión 3D frente a otros tipos de visión
El campo de la visión artificial ha evolucionado mucho en los últimos años. El progreso técnico ha permitido resolver algunos de los problemas existentes en la industria con esta tecnología. Además de la visión 2D tradicional, se ha extendido el uso de otros muchos sensores que trabajan con imágenes de distintos tipos: imágenes termográficas, imágenes hiperespectrales, o imágenes 3D.
Todas ellas se utilizan en aplicaciones que no es posible resolver con la visión 2D tradicional, o que combinan varias técnicas para hacerlo.
Las cámaras 3D, por ejemplo, se utilizan en aplicaciones como: detectar posibles defectos como excesos o carencias de material ó metrología en los casos en los que hay que medir magnitudes 3D del objeto. También se utiliza en aplicaciones para el guiado de robots y localización de piezas. Muchas veces, es necesario combinar varias tecnologías o tipos de imágenes para resolver una misma aplicación por ello es interesante conocer las diferentes opciones que existen.
Existe un abanico muy amplio de posibilidades y hoy nos centramos en explicaros los distintos tipos de cámaras 3D que existen.
Tipos de cámaras de visión 3D
Cámara de visión 3D por triangulación láser (Laser Triangulation)
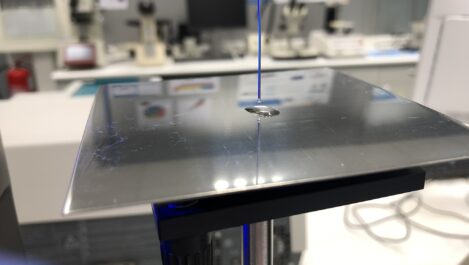
Este tipo de cámaras de visión 3D utilizan un láser que proyecta una línea y una cámara que actúa como receptor. El láser impacta sobre el objeto que modifica la línea proyectada y la luz reflejada incide sobre el receptor con distinto ángulo, dependiendo de la distancia a la que se encuentra. De esta forma se consigue una nube de puntos que representa el objeto. Hay que tener en cuenta que para trabajar con esta técnica el objeto debe estar en movimiento. Se debe realizar un movimiento lineal para que la línea del láser pueda escanear toda la superficie del mismo.
Estos equipos son bastante económicos comparados con otros sensores 3D y tienen mucha precisión, aunque, en este caso, algunas propiedades del objeto, como los brillos, pueden afectar a la reconstrucción.

Cámara de visión mediante imágenes estereoscópicas (Stereo Vision)
La visión estereoscópica se obtiene mediante dos cámaras 2D calibradas entre sí. En este caso se capturan dos imágenes de la misma escena con dos cámaras desde dos puntos distintos. El proceso es semejante al que realizan los ojos humanos. Con las imágenes obtenidas desde dos puntos con las cámaras calibradas, se reconstruye la imagen en 3D. La reconstrucción se realiza basándose en la geometría epipolar, con la cual se puede establecer la correlación entre los puntos representados en las dos imágenes. Se realiza un emparejamiento de píxeles para reconstruir el 3D. Las zonas con mayor textura, es decir, con mayores cambios de color, son las más sencillas de reconstruir ya que el emparejamiento de puntos entre las dos imágenes es más sencillo. Las zonas con menos textura son las más problemáticas.
Los píxeles se emparejan entonces entre los dos conjuntos de imágenes para producir profundidad 3D. Los puntos de coincidencia entre las imágenes se basan en la variación de la textura para encontrar bordes y rasgos distintivos, lo que puede causar problemas cuando las superficies de una escena no tienen suficiente contraste o son demasiado parecidas.

Cámara con luz estructurada (Structured Light)
Las cámaras con luz estructuradas utilizan un principio similar a la triangulación láser. Se proyecta un patrón de luz que proporciona textura a la superficie de un objeto lo que permite realizar la reconstrucción.
En este caso el objeto no debe moverse, sino que debe permanecer estático. Los patrones de luz se emiten mediante láser habitualmente son binarios. Son sensores muy precisos y se pueden reconstruir objetos muy grandes, el principal problema que presentan es que son muy sensibles a los cambios de luz y no es posible utilizarlo con materiales transparentes.

Cámara basada en tiempo de vuelo (Time of Flight, ToF)
Las cámaras basadas en el principio de tiempo de vuelo emiten un pulso láser y calculan el tiempo que tarda este pulso en ir hasta el objeto y volver al sensor de la imagen La distancia se calcula en función del retraso entre la emisión y la lectura del pulso de vuelta. Para ello, es necesario conocer la velocidad a la que se emite el pulso. Habitualmente estas cámaras trabajan en la longitud de onda del infrarrojo cercano.
La reconstrucción es muy rápida pero esta técnica también presenta problemas con los cambios de iluminación y los objetos transparentes. La resolución que se obtiene habitualmente con las cámaras de este tipo es de +/- 1cm. Por ejemplo, estas cámaras son las que se utilizan en muchos videojuegos como Kinect o Xbox.
Aplicaciones industriales de las cámaras de visión 3D
La visión 3D abre las puertas para solucionar problemas con visión artificial que no se pueden abordar únicamente utilizando visión 2D. A continuación, os contamos algunas de las aplicaciones industriales en las que se utiliza visión 3D.
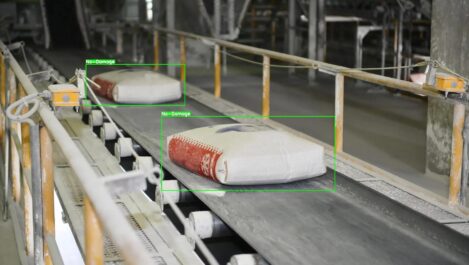
Visión 3D para inspección de defectos
Se utiliza visión 3D en sistemas de visión artificial para procesos de calidad en los que se identifican y localizan defectos superficiales, geométricos etc. Estas inspecciones se realizan, generalmente de forma visual, y son procesos costosos que deben realizarse por personal con mucha formación. Los sistemas de inspección automáticos pueden reducir el tiempo de inspección y aumentar la fiabilidad de los resultados y la calidad de los mismos, gracias a la visión 3D es posible ver la profundidad y gravedad del defecto.
Un ejemplo son los procesos de soldadura en los que los posibles errores conllevan no solo un defecto estético, sino que también afectan a la funcionalidad del mismo.

Control dimensional y metrología
El control dimensional permite medir las magnitudes físicas de un objeto y sirven como parámetro de calidad tanto del proceso como del producto.
Los datos obtenidos con este control dimensional, además de garantizar la calidad del producto son una fuente de información para la mejora del proceso.
Los sistemas de control dimensional incluyen sensores 3D y son aplicables en multitud de sectores y aplicaciones.

Visión 3D y robots
Otra de las aplicaciones más comunes de las cámaras 3D es la unión con la robótica. Mediante la cámara 3D se pueden localizar y posicionar los objetos para, posteriormente, realizar el picking de los mismos. Se utilizan, por ejemplo, en sistemas de bin picking.
La robótica guiada por visión artificial se convierte en una herramienta muy versátil que se puede aplicar en distintos procesos.

¿Quieres aplicar Visión 3D en alguno de tus Proyectos? ¡Contacta con nosotros!